《我的小黄》- Automaton
《我的小黄》- Automaton
Laser Cutting | Maker Hub 2024 Spring
XiaoHuang was the little dog who accompanied me through my childhood. After I moved to the United States for my studies, our reunions became increasingly rare, and in 2022, she passed away, leaving for Doggy Heaven. This automaton is created to commemorate the precious moments she spent by my side—from joyfully circling around me as my dear friend, comforting me during my solitary tears, quietly lying by my side as she aged, and ultimately finding her rest in a little box beneath a tree.
XiaoHuang was the little dog who accompanied me through my childhood. After I moved to the United States for my studies, our reunions became increasingly rare, and in 2022, she passed away, leaving for Doggy Heaven. This automaton is created to commemorate the precious moments she spent by my side—from joyfully circling around me as my dear friend, comforting me during my solitary tears, quietly lying by my side as she aged, and ultimately finding her rest in a little box beneath a tree.
XiaoHuang was the little dog who accompanied me through my childhood. After I moved to the United States for my studies, our reunions became increasingly rare, and in 2022, she passed away, leaving for Doggy Heaven. This automaton is created to commemorate the precious moments she spent by my side—from joyfully circling around me as my dear friend, comforting me during my solitary tears, quietly lying by my side as she aged, and ultimately finding her rest in a little box beneath a tree.
Design Process
Design Process
Design Process
When creating the model, I considered two fabrication methods: laser cutting and woodworking. Given my limited familiarity with woodworking, achieving the desired level of detail within the available time presented a significant challenge. Therefore, I decided to utilize laser cutting, a technique with which I am more comfortable.
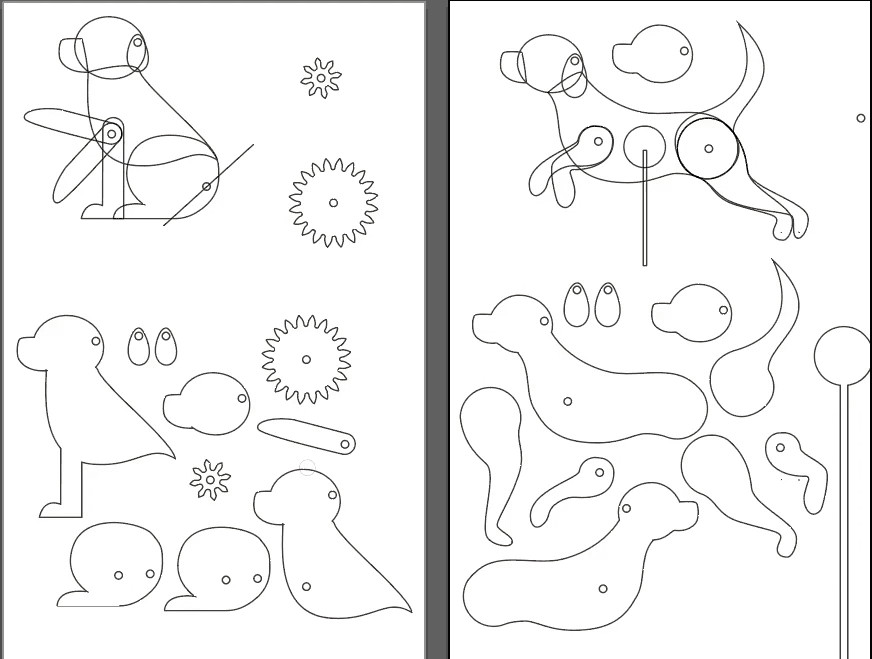
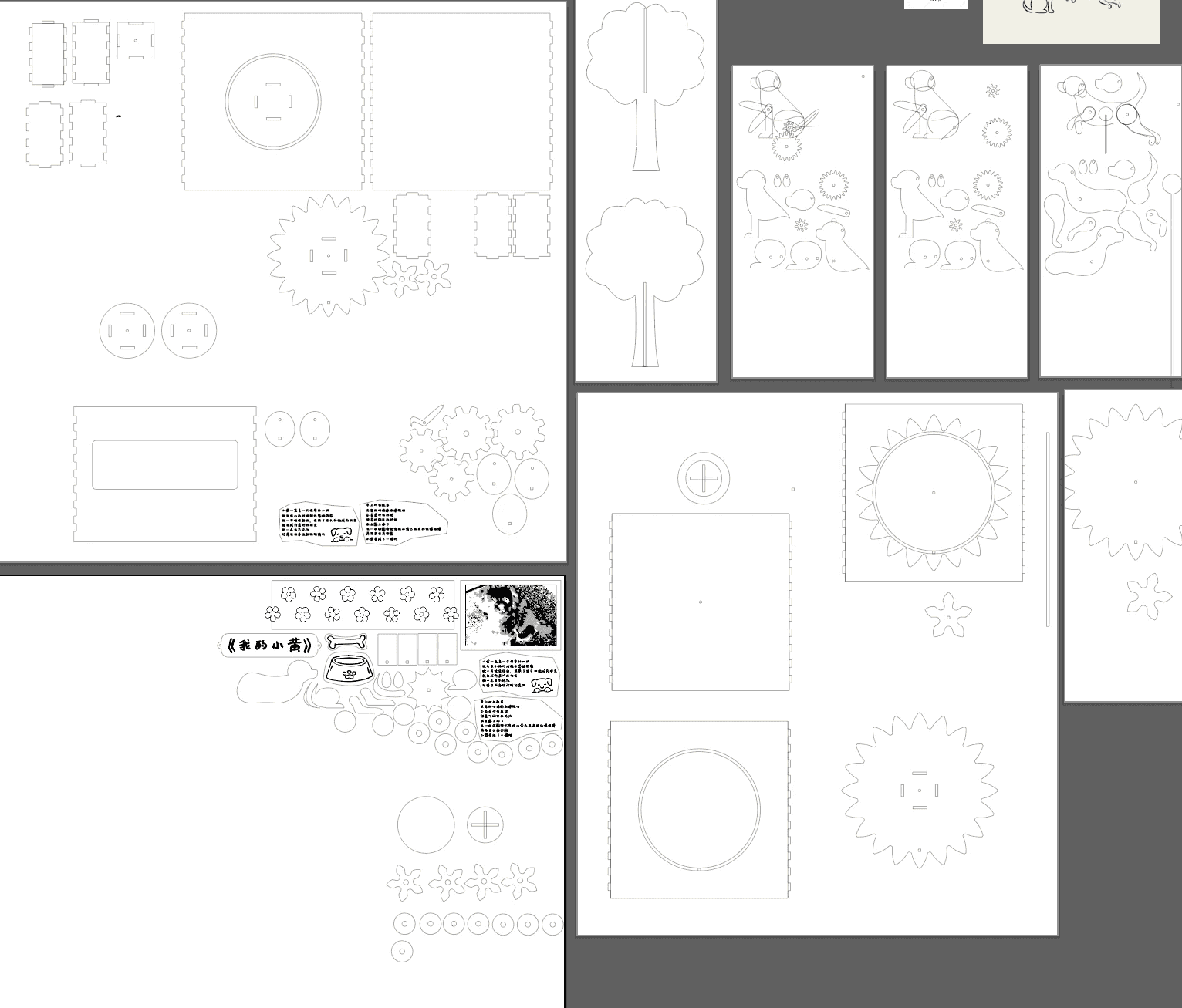
After researching and collecting illustrations of various dog poses online, I used Adobe Illustrator to create detailed drawings of all the necessary components for the automaton. These included the model of the dog, gears, the box, and decorative elements.
When creating the model, I considered two fabrication methods: laser cutting and woodworking. Given my limited familiarity with woodworking, achieving the desired level of detail within the available time presented a significant challenge. Therefore, I decided to utilize laser cutting, a technique with which I am more comfortable.
After researching and collecting illustrations of various dog poses online, I used Adobe Illustrator to create detailed drawings of all the necessary components for the automaton. These included the model of the dog, gears, the box, and decorative elements.
When creating the model, I considered two fabrication methods: laser cutting and woodworking. Given my limited familiarity with woodworking, achieving the desired level of detail within the available time presented a significant challenge. Therefore, I decided to utilize laser cutting, a technique with which I am more comfortable.
After researching and collecting illustrations of various dog poses online, I used Adobe Illustrator to create detailed drawings of all the necessary components for the automaton. These included the model of the dog, gears, the box, and decorative elements.
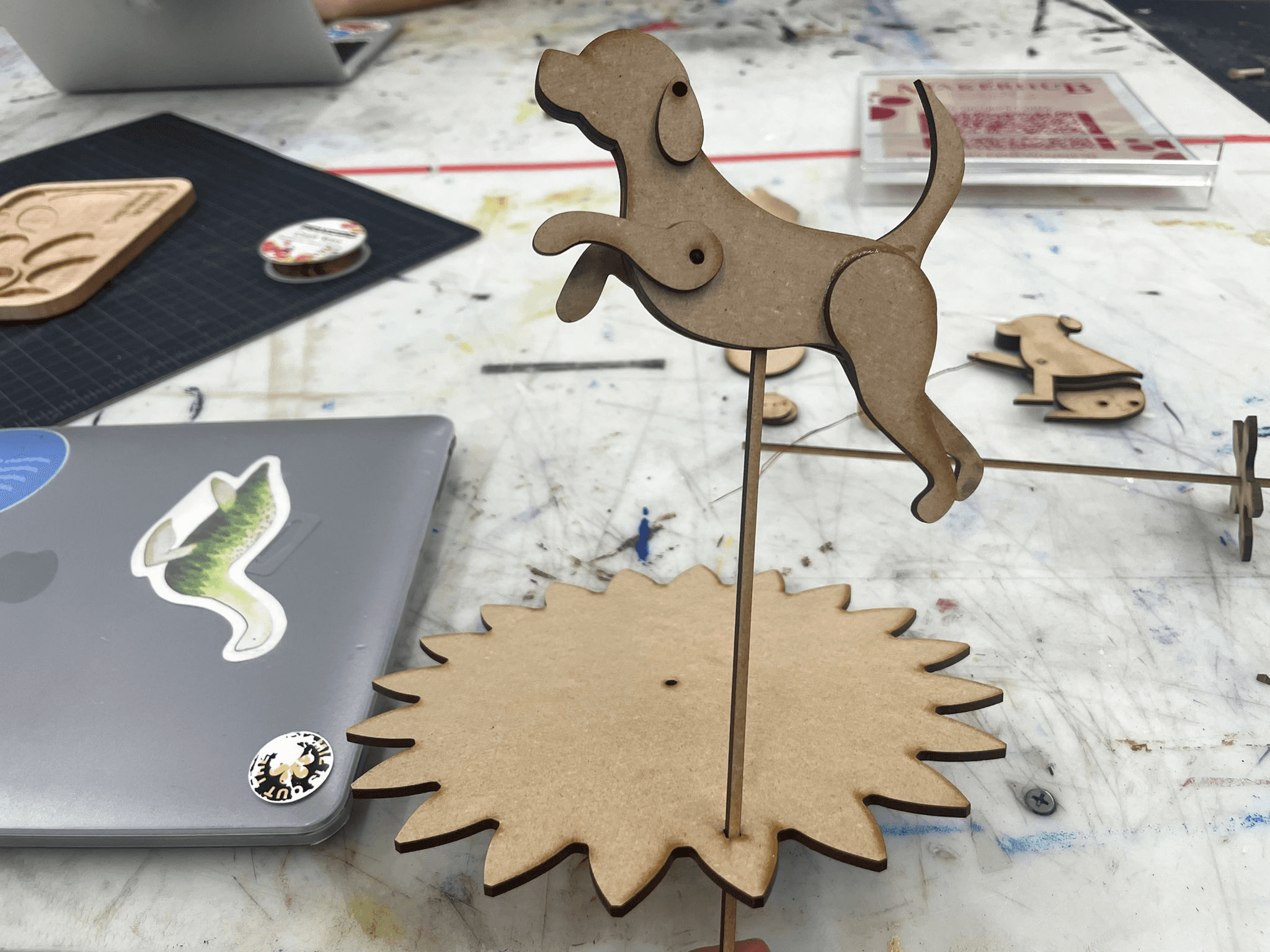
I aimed to achieve two specific motions in the automaton: the dog running in circles and the dog raising its paw. To accomplish these movements, I planned to utilize gears and cams respectively, allowing for the precise replication of these dynamic actions.
I aimed to achieve two specific motions in the automaton: the dog running in circles and the dog raising its paw. To accomplish these movements, I planned to utilize gears and cams respectively, allowing for the precise replication of these dynamic actions.
I aimed to achieve two specific motions in the automaton: the dog running in circles and the dog raising its paw. To accomplish these movements, I planned to utilize gears and cams respectively, allowing for the precise replication of these dynamic actions.
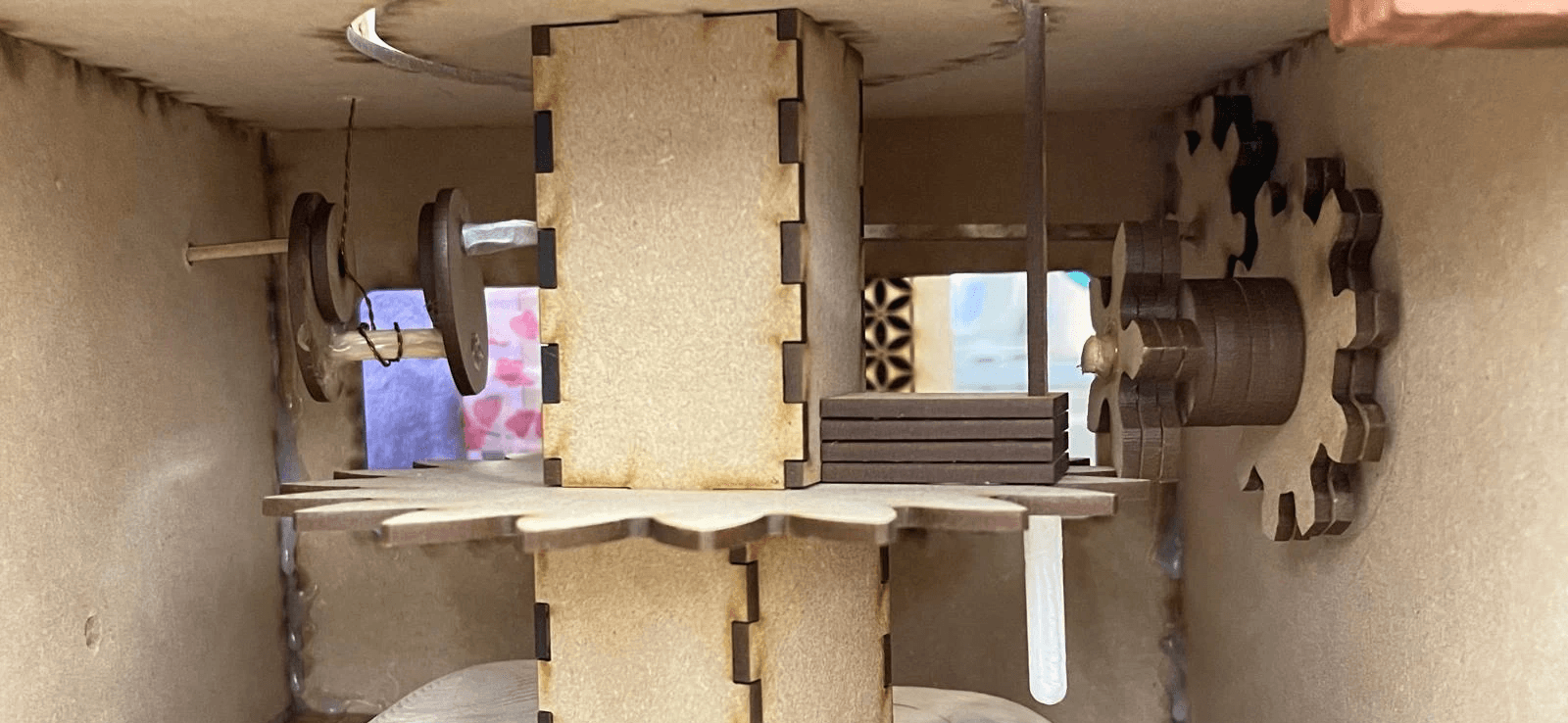
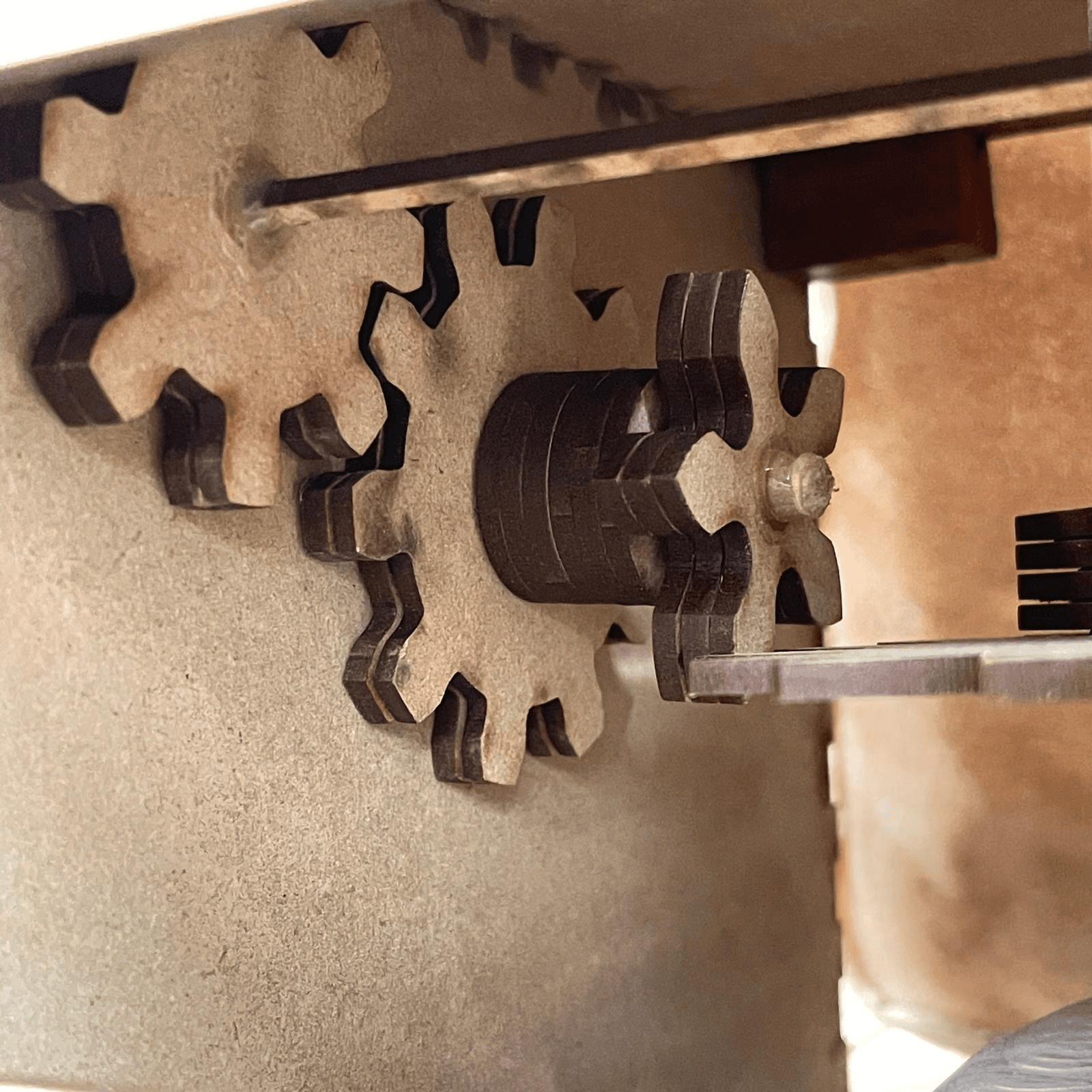
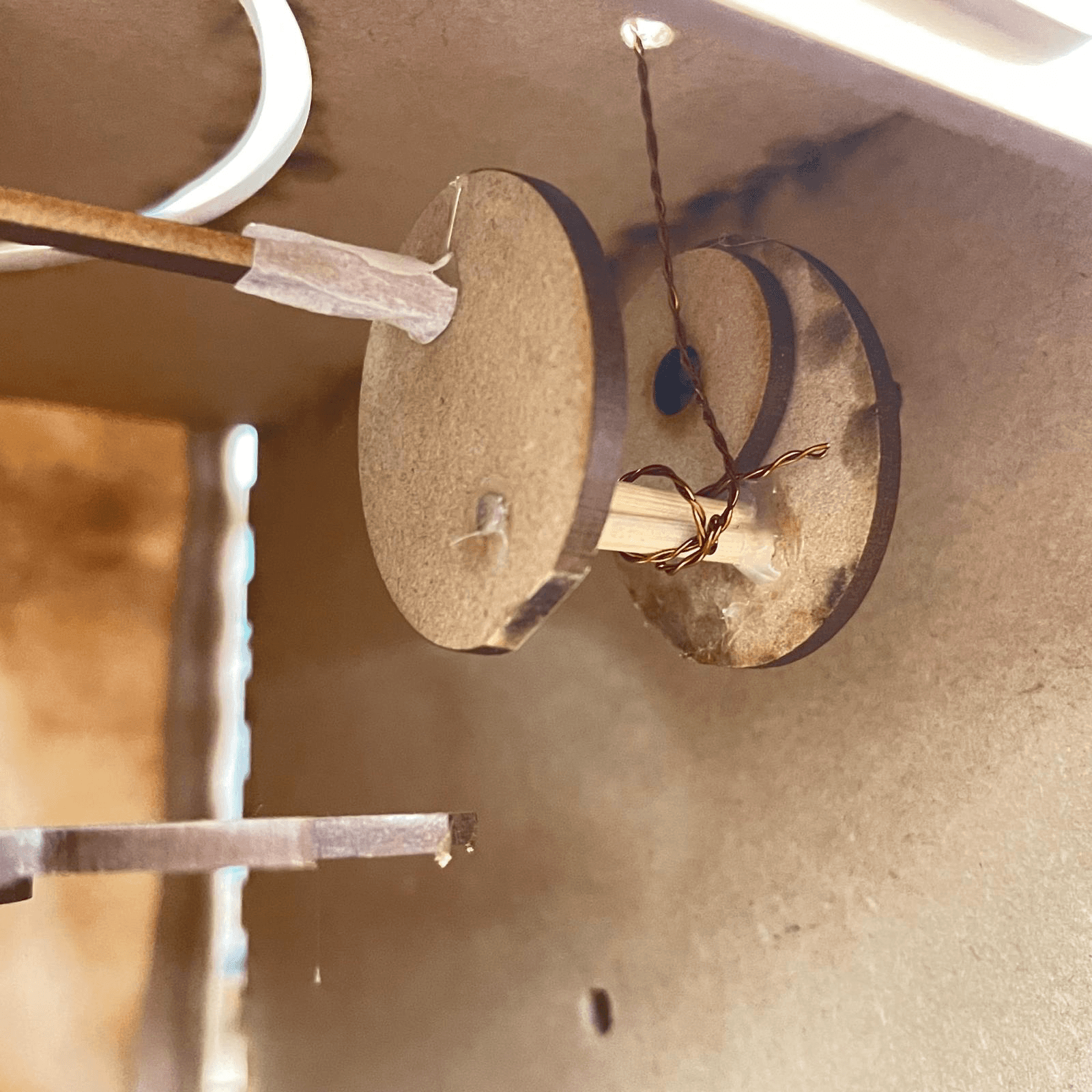
I utilized gears to link the various components together, enabling two movements to be generated by simply turning a single handle. This setup allowed for a seamless and synchronized operation of the automaton, showcasing both the running and comforting gestures of the dog.
I utilized gears to link the various components together, enabling two movements to be generated by simply turning a single handle. This setup allowed for a seamless and synchronized operation of the automaton, showcasing both the running and comforting gestures of the dog.
I utilized gears to link the various components together, enabling two movements to be generated by simply turning a single handle. This setup allowed for a seamless and synchronized operation of the automaton, showcasing both the running and comforting gestures of the dog.
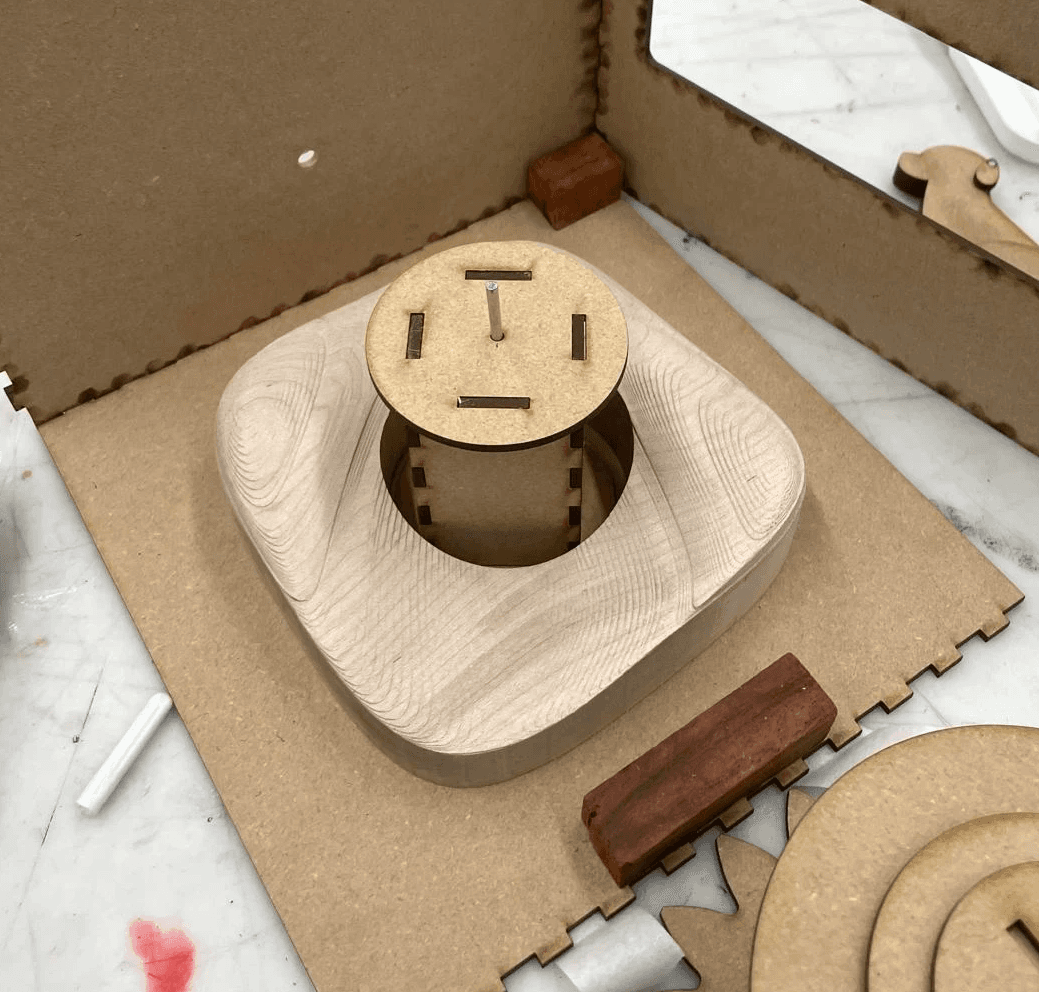
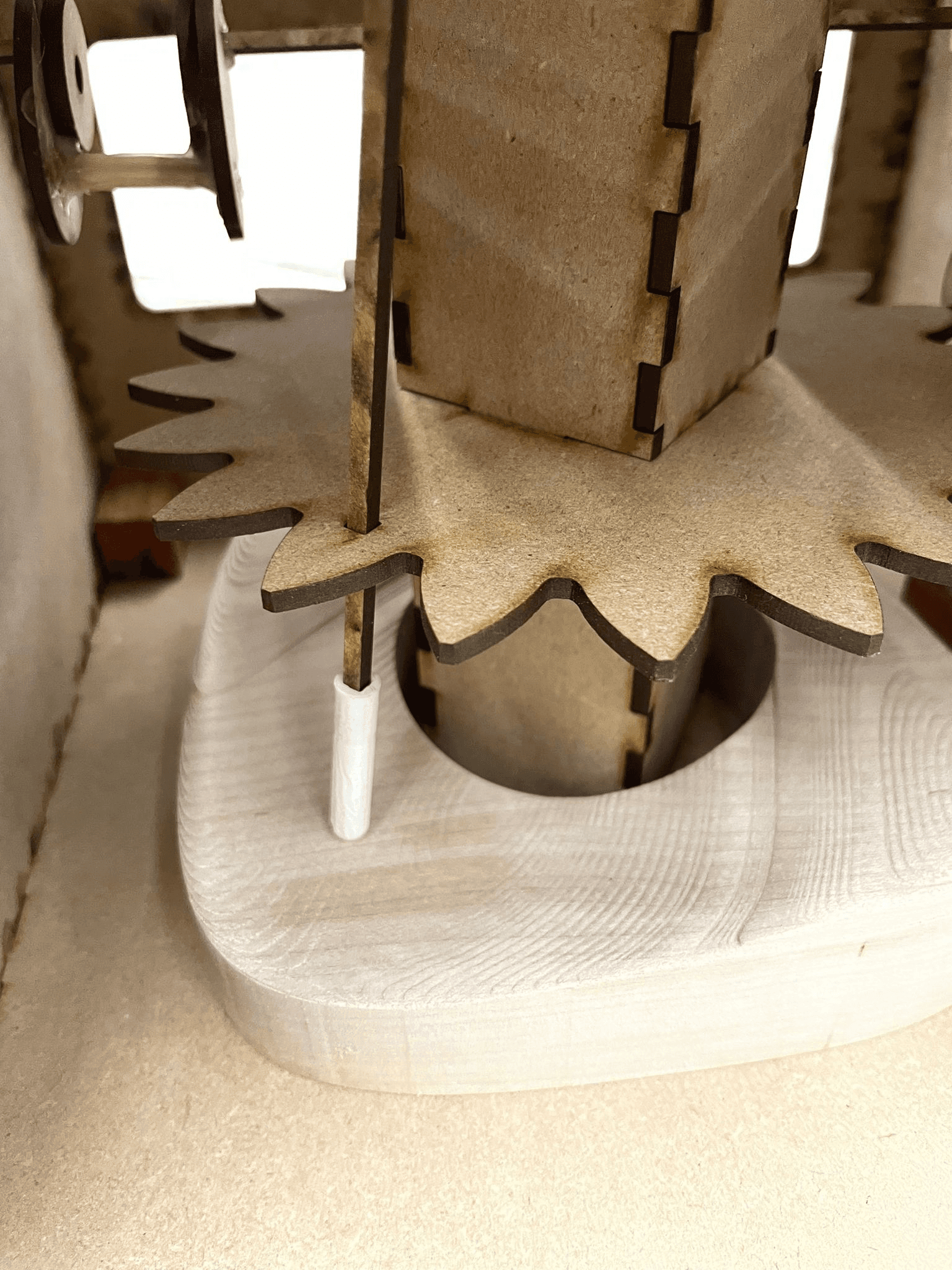
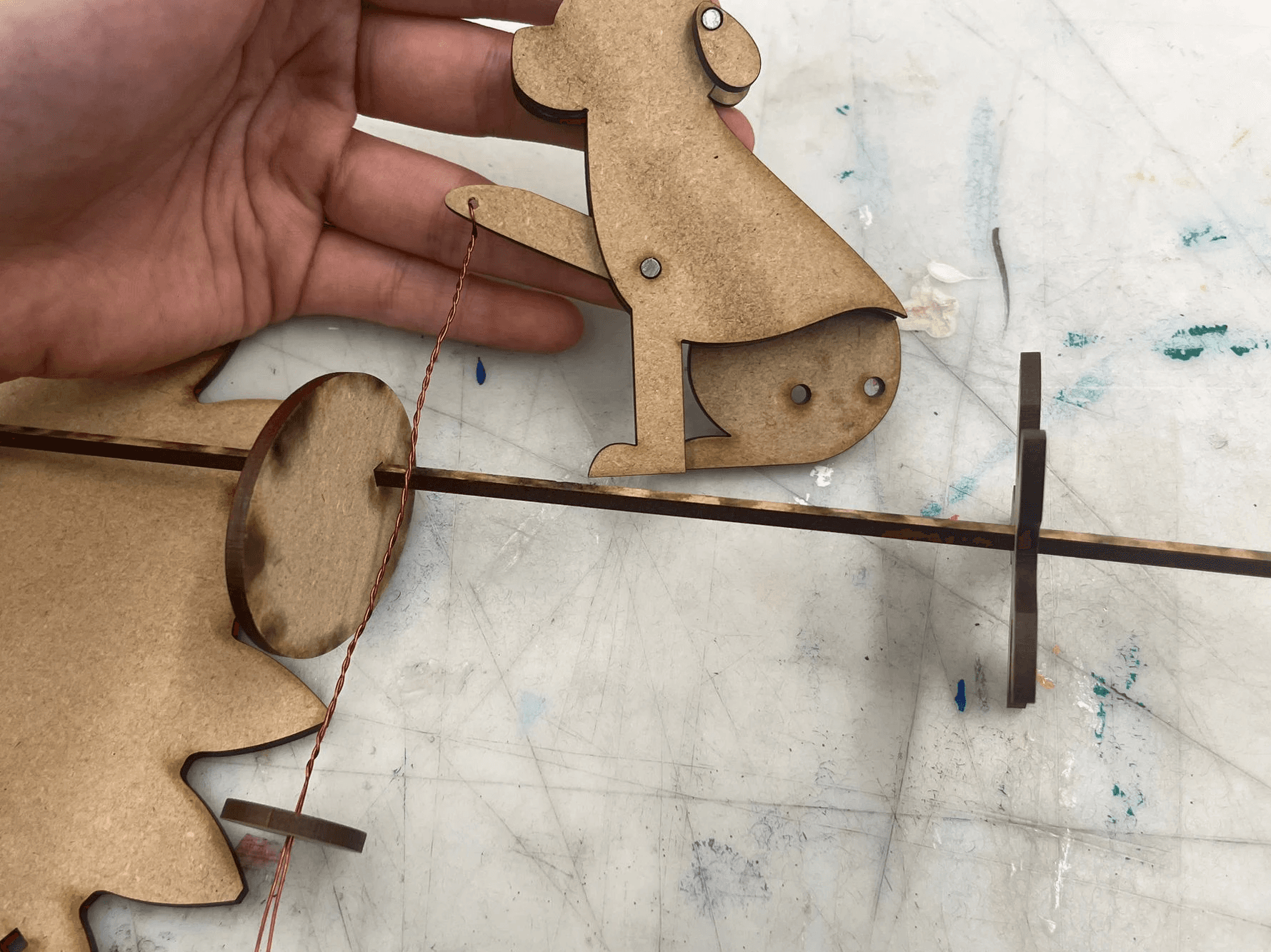
Furthermore, I wanted to add an interesting element that would allow the dog to move up and down while running in circles. To achieve this, I utilized CNC technology to create a base with an irregular surface. To reduce the friction between the wood components and allow for smoother movement, I also designed a sleeve using 3D printing for the base of the rods connected to the dog model.
Furthermore, I wanted to add an interesting element that would allow the dog to move up and down while running in circles. To achieve this, I utilized CNC technology to create a base with an irregular surface. To reduce the friction between the wood components and allow for smoother movement, I also designed a sleeve using 3D printing for the base of the rods connected to the dog model.
Furthermore, I wanted to add an interesting element that would allow the dog to move up and down while running in circles. To achieve this, I utilized CNC technology to create a base with an irregular surface. To reduce the friction between the wood components and allow for smoother movement, I also designed a sleeve using 3D printing for the base of the rods connected to the dog model.
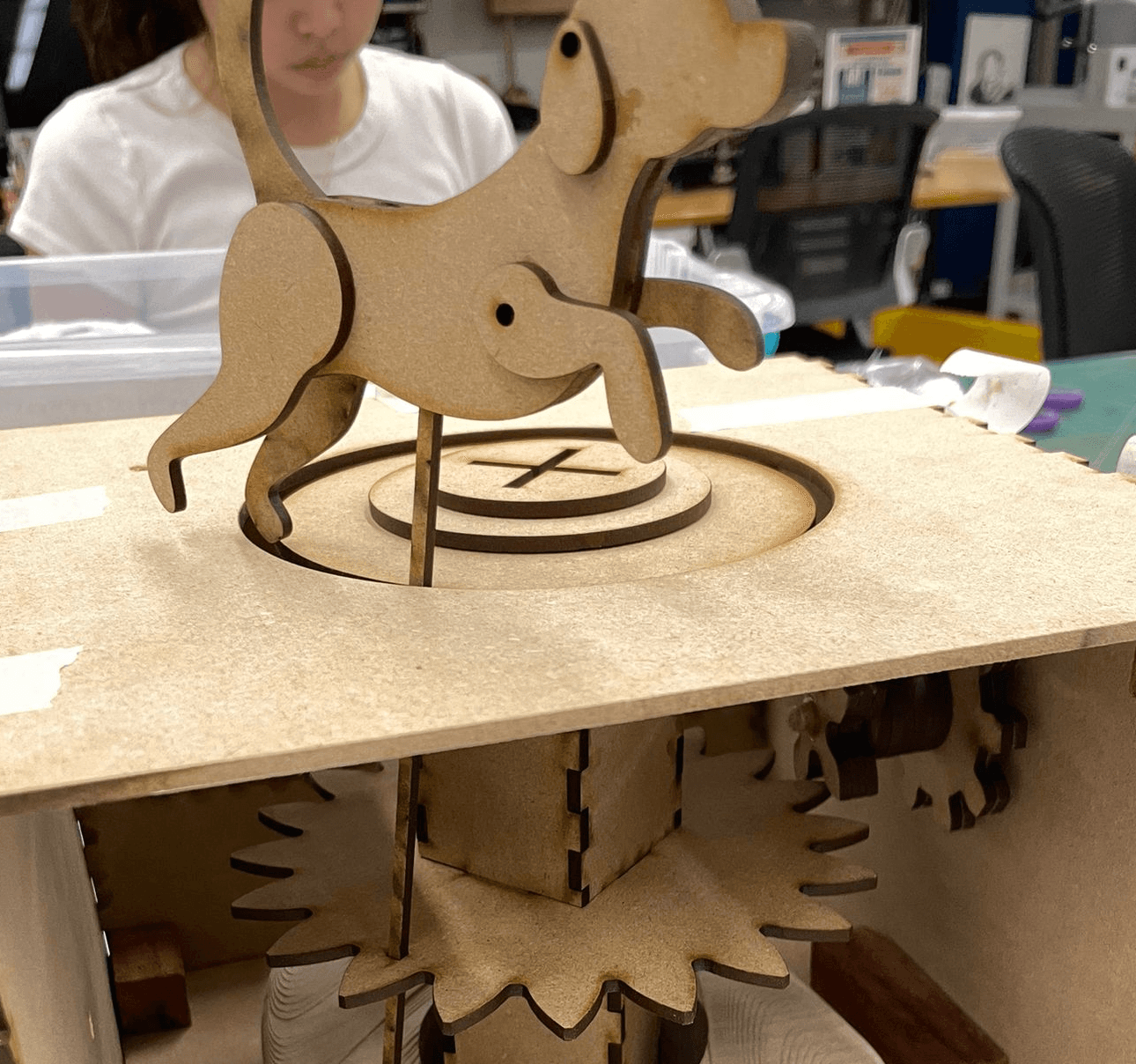

Additionally, the top of the automaton features a cross-shaped base that is designed to be detachable. This allows for the tree accompanying the dog to be easily swapped with other items. Thus, users can customize what rotates alongside the dog, enhancing the interactive and personalized aspects of the device.
Additionally, the top of the automaton features a cross-shaped base that is designed to be detachable. This allows for the tree accompanying the dog to be easily swapped with other items. Thus, users can customize what rotates alongside the dog, enhancing the interactive and personalized aspects of the device.
Additionally, the top of the automaton features a cross-shaped base that is designed to be detachable. This allows for the tree accompanying the dog to be easily swapped with other items. Thus, users can customize what rotates alongside the dog, enhancing the interactive and personalized aspects of the device.
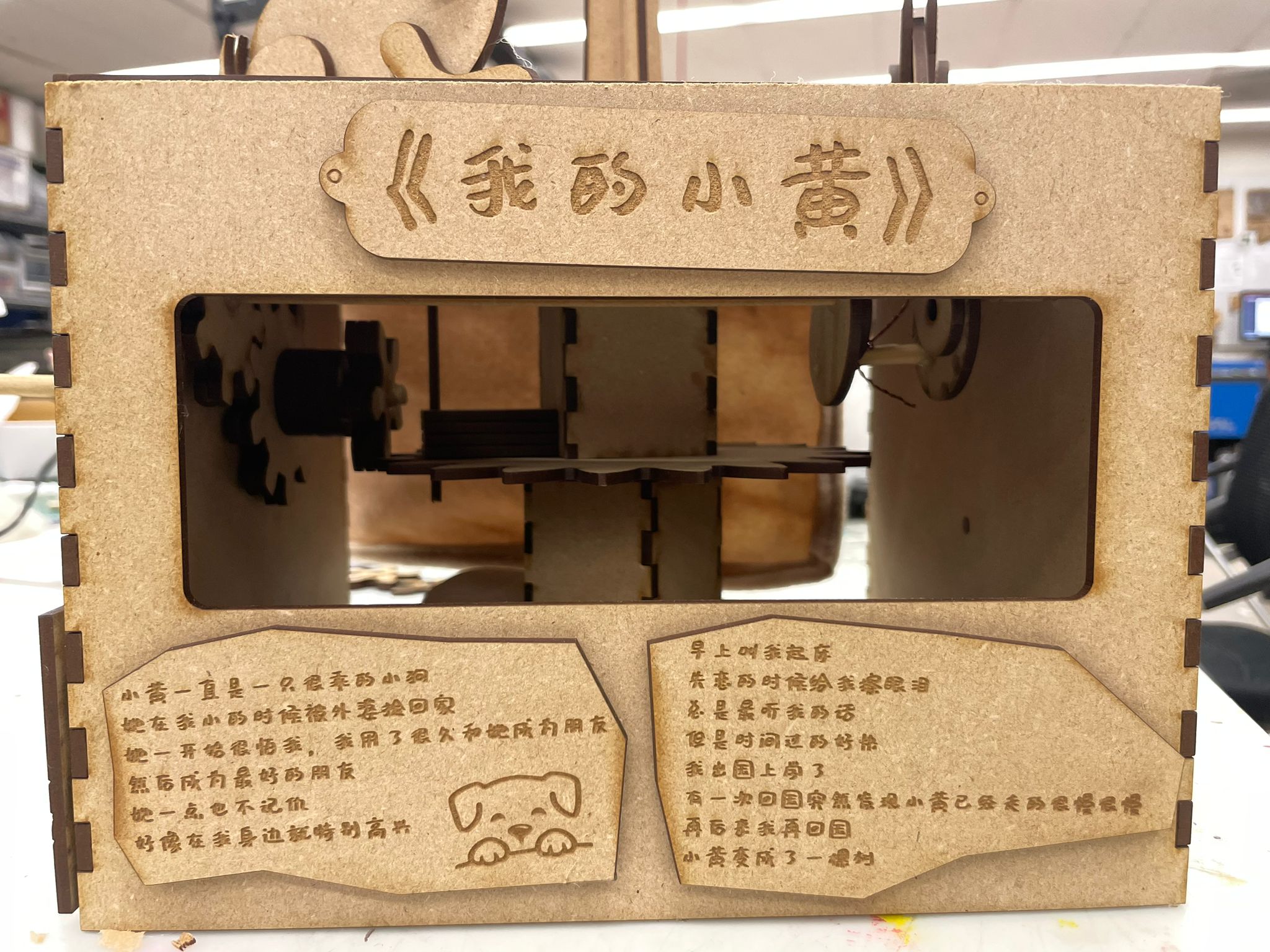
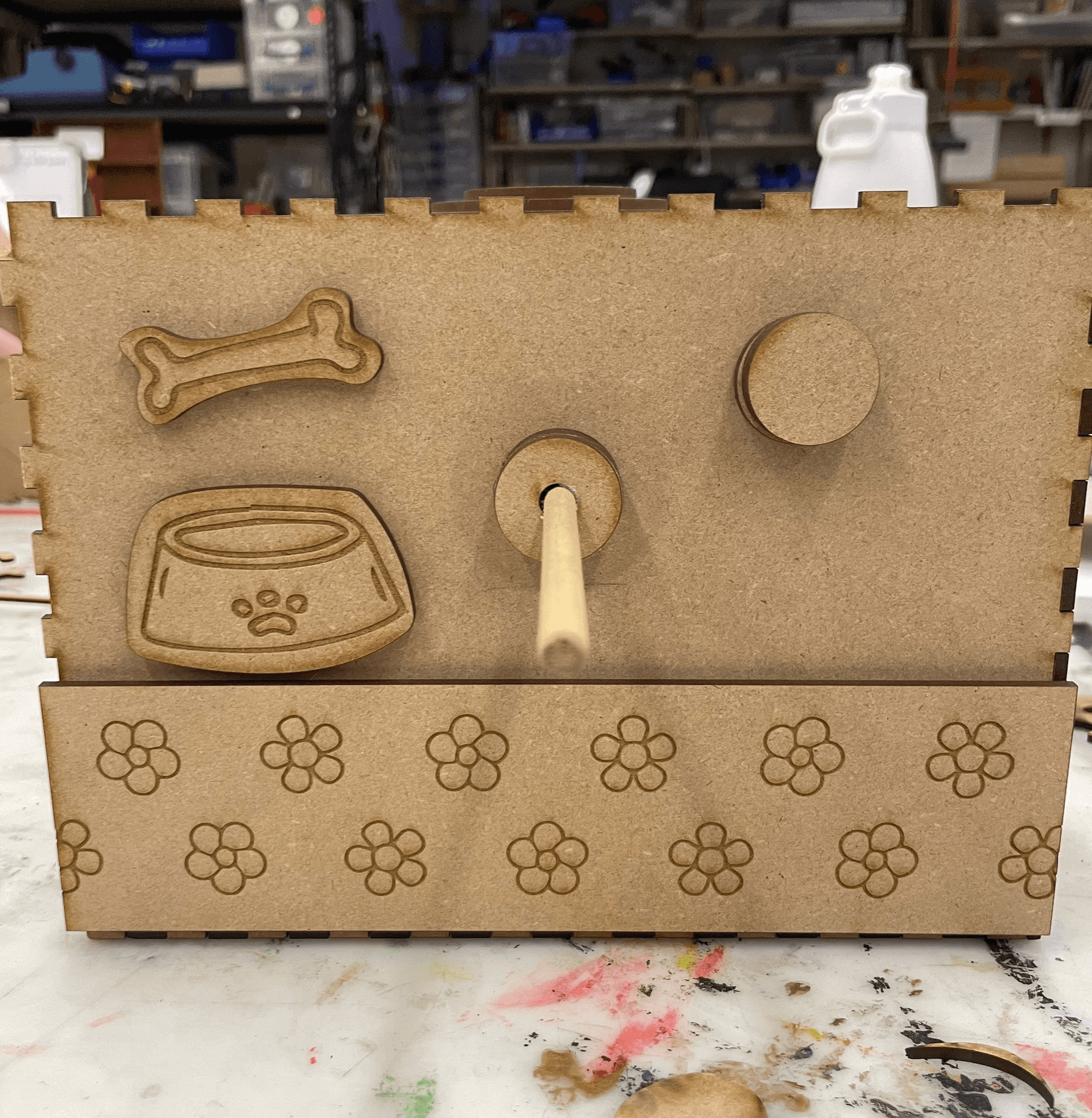
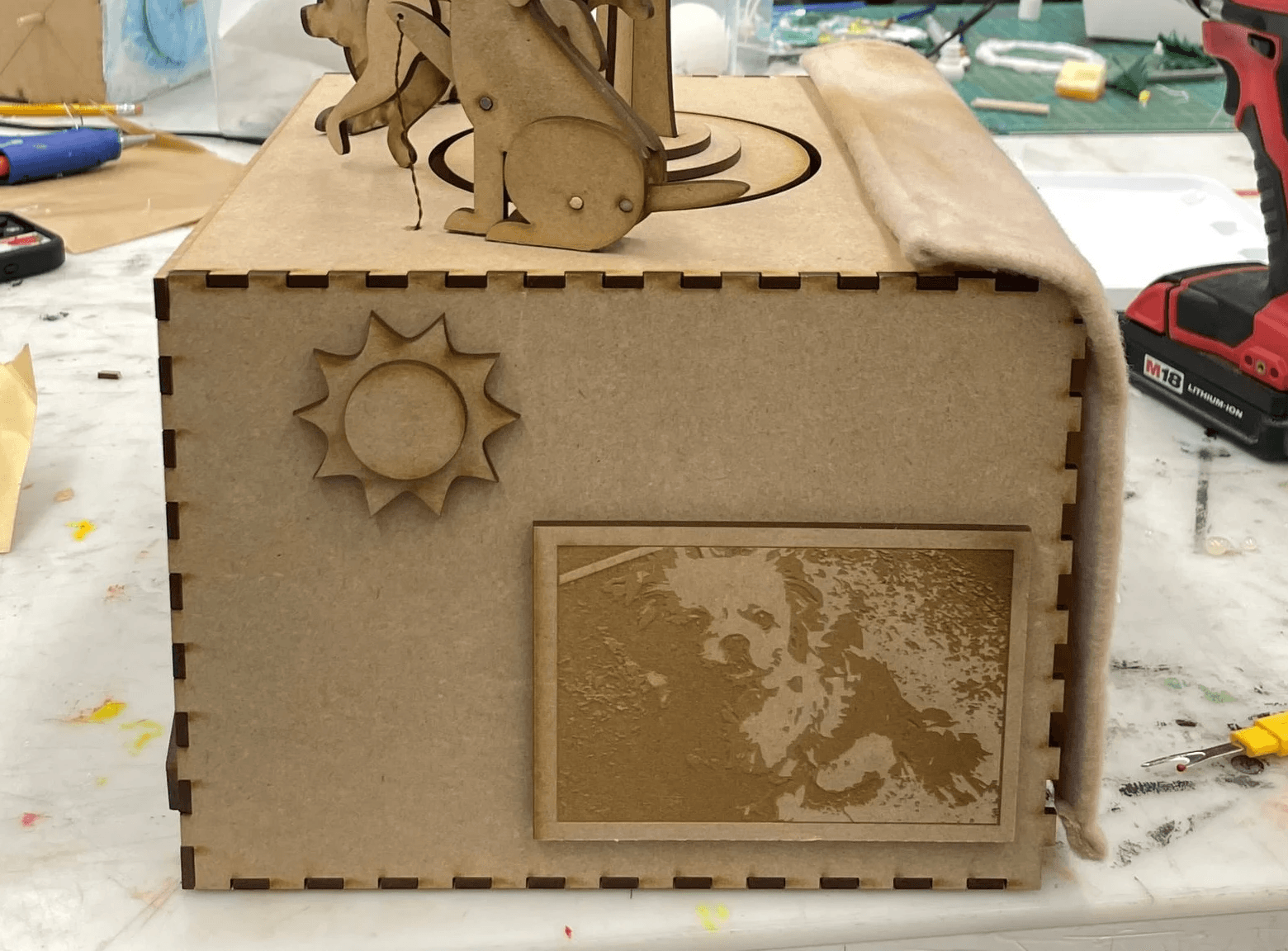

In designing the decorations for my box, I aimed to evoke a nostalgic and vintage ambiance. Believing that the natural color of the wood best conveyed this sentiment, I decided against painting the assembly, a choice also suggested in one of my peer review comments. The front of the box narrates the story of my dog and me, titled "My Xiao Huang" in a style reminiscent of essay titles from Chinese elementary school compositions. The narrative is creatively divided into two irregular sections, mimicking the look of scrap paper. Additionally, I placed a photo of my dog on the left side of the box, where the handle is shaped like the sun, which also rotates as the handle is turned.
Originally, I intended to include an electronic sound device to play music, but encountered obstacles while using Arduino. The current setup allows music to play automatically, but does not integrate the music play with a switch button (press to play; press again to stop). Therefore, I decided not to seal the back of the box, to facilitate future additions and maintenance. Considering aesthetics and portability, I sewed a fabric cover for the back, ensuring accessibility to the internal components while adding a soft, warm tactile and visual quality to the device.
In designing the decorations for my box, I aimed to evoke a nostalgic and vintage ambiance. Believing that the natural color of the wood best conveyed this sentiment, I decided against painting the assembly, a choice also suggested in one of my peer review comments. The front of the box narrates the story of my dog and me, titled "My Xiao Huang" in a style reminiscent of essay titles from Chinese elementary school compositions. The narrative is creatively divided into two irregular sections, mimicking the look of scrap paper. Additionally, I placed a photo of my dog on the left side of the box, where the handle is shaped like the sun, which also rotates as the handle is turned.
Originally, I intended to include an electronic sound device to play music, but encountered obstacles while using Arduino. The current setup allows music to play automatically, but does not integrate the music play with a switch button (press to play; press again to stop). Therefore, I decided not to seal the back of the box, to facilitate future additions and maintenance. Considering aesthetics and portability, I sewed a fabric cover for the back, ensuring accessibility to the internal components while adding a soft, warm tactile and visual quality to the device.
In designing the decorations for my box, I aimed to evoke a nostalgic and vintage ambiance. Believing that the natural color of the wood best conveyed this sentiment, I decided against painting the assembly, a choice also suggested in one of my peer review comments. The front of the box narrates the story of my dog and me, titled "My Xiao Huang" in a style reminiscent of essay titles from Chinese elementary school compositions. The narrative is creatively divided into two irregular sections, mimicking the look of scrap paper. Additionally, I placed a photo of my dog on the left side of the box, where the handle is shaped like the sun, which also rotates as the handle is turned.
Originally, I intended to include an electronic sound device to play music, but encountered obstacles while using Arduino. The current setup allows music to play automatically, but does not integrate the music play with a switch button (press to play; press again to stop). Therefore, I decided not to seal the back of the box, to facilitate future additions and maintenance. Considering aesthetics and portability, I sewed a fabric cover for the back, ensuring accessibility to the internal components while adding a soft, warm tactile and visual quality to the device.
Technical Details
Technical Details
Technical Details
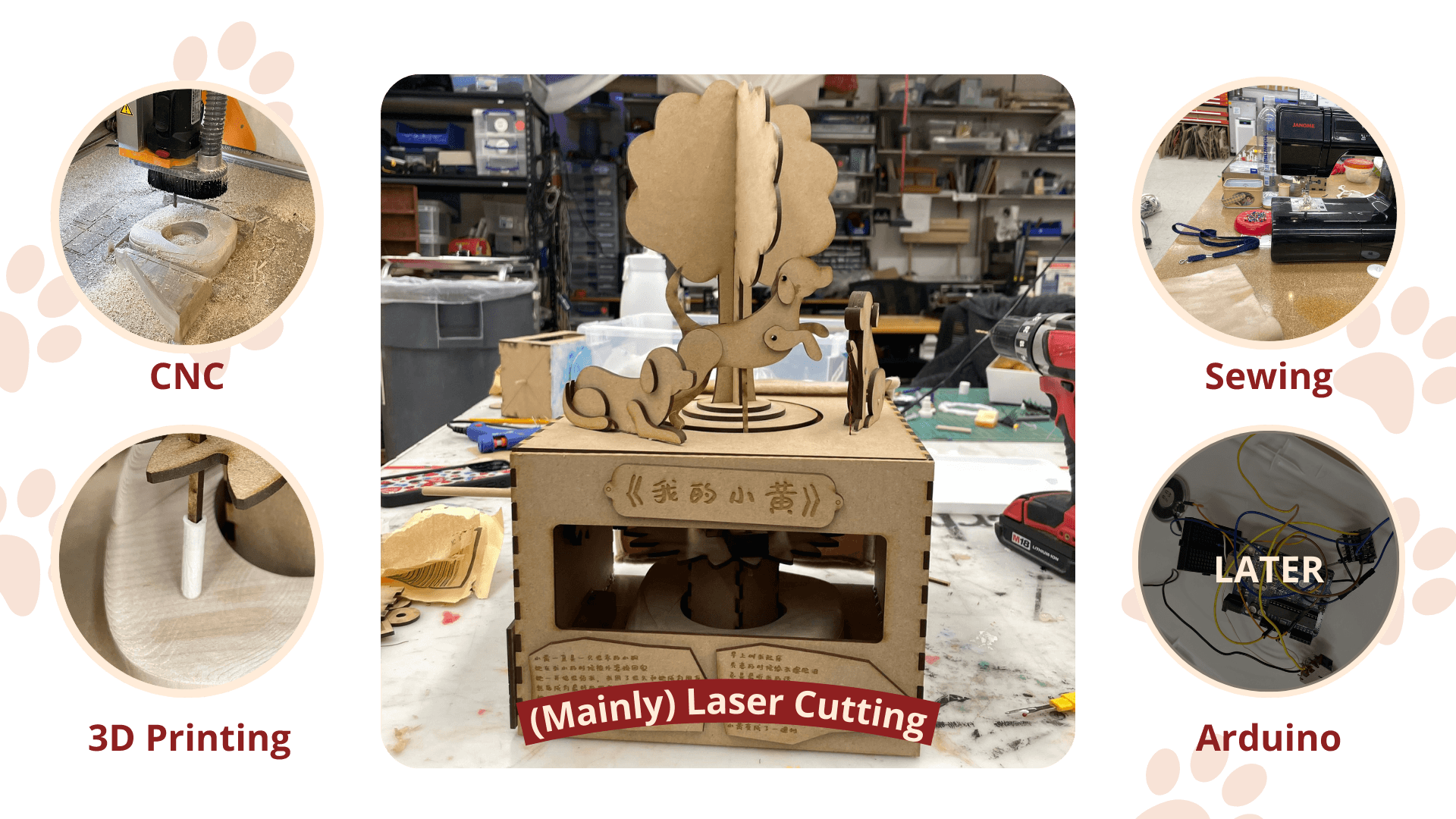
This project primarily utilized laser cutting technology to create most of the model, the box, and the internal components. Additionally, the base was crafted using CNC machining, the rod sleeves were produced via 3D printing, and the box back cover was made through sewing. Moreover, an Arduino-powered music box component, which is slated for further development and refinement, is also included in the design.
This project primarily utilized laser cutting technology to create most of the model, the box, and the internal components. Additionally, the base was crafted using CNC machining, the rod sleeves were produced via 3D printing, and the box back cover was made through sewing. Moreover, an Arduino-powered music box component, which is slated for further development and refinement, is also included in the design.
This project primarily utilized laser cutting technology to create most of the model, the box, and the internal components. Additionally, the base was crafted using CNC machining, the rod sleeves were produced via 3D printing, and the box back cover was made through sewing. Moreover, an Arduino-powered music box component, which is slated for further development and refinement, is also included in the design.
Conclusion
Conclusion
Conclusion
This project successfully commemorates my childhood companion, XiaoHuang, through an interactive automaton that blends advanced manufacturing techniques with traditional craftsmanship. This automaton was crafted using laser cutting for structural components, sewing for aesthetic finishing, and CNC machining and 3D printing for functional enhancements, with plans to integrate an Arduino-based sound system for interactive features. By achieving the dual motions of running and comforting gestures, the automaton brings to life our shared moments.
This project successfully commemorates my childhood companion, XiaoHuang, through an interactive automaton that blends advanced manufacturing techniques with traditional craftsmanship. This automaton was crafted using laser cutting for structural components, sewing for aesthetic finishing, and CNC machining and 3D printing for functional enhancements, with plans to integrate an Arduino-based sound system for interactive features. By achieving the dual motions of running and comforting gestures, the automaton brings to life our shared moments.
This project successfully commemorates my childhood companion, XiaoHuang, through an interactive automaton that blends advanced manufacturing techniques with traditional craftsmanship. This automaton was crafted using laser cutting for structural components, sewing for aesthetic finishing, and CNC machining and 3D printing for functional enhancements, with plans to integrate an Arduino-based sound system for interactive features. By achieving the dual motions of running and comforting gestures, the automaton brings to life our shared moments.
Reflection
Reflection
Reflection
The design process for this automaton was a balance of planning and adaptation. Initially, I concentrated on creating detailed blueprints and layouts to minimize rework. I intended to assign both motions to a single trigger, which necessitated a high level of precision in the internal structure for each movement. While this approach was theoretically efficient, it led to extensive time spent on planning and measuring in the early stages, delaying the overall production schedule.
As the project progressed, peer discussions encouraged me to begin assembly before finalizing the blueprints, allowing for dynamic adjustments to enhance efficiency. During this process, I realized that my initial overemphasis on the blueprints had led to a gap in my understanding of the actual material properties, such as wood’s tendency to break and its high friction, leading to some imprecise initial choices. For instance, square wooden rods used in construction unexpectedly broke three times, causing delays that could have been avoided with a more flexible planning approach.
In my efforts toward sustainable making, I utilized scrap materials and optimized material usage with precise laser cutting. This approach is commendable and aligns with sustainable practices. However, I also learned that economizing to the extent that it compromises the final product's effectiveness is counterproductive. For example, while converting the gears from flat to right angle gears, I opted to reuse the initially cut flat gears to save resources. Despite being functional, this decision resulted in a less-than-perfect fit, affecting the smoothness of operation. This experience underscored the lesson that sustainability efforts should be balanced with the necessity of meeting design and functional standards.
This project taught me about the dual nature of things: the need for balance between perfection in planning and the adaptability required in execution. It highlighted the importance of understanding material properties comprehensively and balancing detailed planning with flexibility to adapt to unforeseen challenges, all while maintaining a commitment to sustainability without compromising the quality of the final product.
The design process for this automaton was a balance of planning and adaptation. Initially, I concentrated on creating detailed blueprints and layouts to minimize rework. I intended to assign both motions to a single trigger, which necessitated a high level of precision in the internal structure for each movement. While this approach was theoretically efficient, it led to extensive time spent on planning and measuring in the early stages, delaying the overall production schedule.
As the project progressed, peer discussions encouraged me to begin assembly before finalizing the blueprints, allowing for dynamic adjustments to enhance efficiency. During this process, I realized that my initial overemphasis on the blueprints had led to a gap in my understanding of the actual material properties, such as wood’s tendency to break and its high friction, leading to some imprecise initial choices. For instance, square wooden rods used in construction unexpectedly broke three times, causing delays that could have been avoided with a more flexible planning approach.
In my efforts toward sustainable making, I utilized scrap materials and optimized material usage with precise laser cutting. This approach is commendable and aligns with sustainable practices. However, I also learned that economizing to the extent that it compromises the final product's effectiveness is counterproductive. For example, while converting the gears from flat to right angle gears, I opted to reuse the initially cut flat gears to save resources. Despite being functional, this decision resulted in a less-than-perfect fit, affecting the smoothness of operation. This experience underscored the lesson that sustainability efforts should be balanced with the necessity of meeting design and functional standards.
This project taught me about the dual nature of things: the need for balance between perfection in planning and the adaptability required in execution. It highlighted the importance of understanding material properties comprehensively and balancing detailed planning with flexibility to adapt to unforeseen challenges, all while maintaining a commitment to sustainability without compromising the quality of the final product.
The design process for this automaton was a balance of planning and adaptation. Initially, I concentrated on creating detailed blueprints and layouts to minimize rework. I intended to assign both motions to a single trigger, which necessitated a high level of precision in the internal structure for each movement. While this approach was theoretically efficient, it led to extensive time spent on planning and measuring in the early stages, delaying the overall production schedule.
As the project progressed, peer discussions encouraged me to begin assembly before finalizing the blueprints, allowing for dynamic adjustments to enhance efficiency. During this process, I realized that my initial overemphasis on the blueprints had led to a gap in my understanding of the actual material properties, such as wood’s tendency to break and its high friction, leading to some imprecise initial choices. For instance, square wooden rods used in construction unexpectedly broke three times, causing delays that could have been avoided with a more flexible planning approach.
In my efforts toward sustainable making, I utilized scrap materials and optimized material usage with precise laser cutting. This approach is commendable and aligns with sustainable practices. However, I also learned that economizing to the extent that it compromises the final product's effectiveness is counterproductive. For example, while converting the gears from flat to right angle gears, I opted to reuse the initially cut flat gears to save resources. Despite being functional, this decision resulted in a less-than-perfect fit, affecting the smoothness of operation. This experience underscored the lesson that sustainability efforts should be balanced with the necessity of meeting design and functional standards.
This project taught me about the dual nature of things: the need for balance between perfection in planning and the adaptability required in execution. It highlighted the importance of understanding material properties comprehensively and balancing detailed planning with flexibility to adapt to unforeseen challenges, all while maintaining a commitment to sustainability without compromising the quality of the final product.
References
References
References
The gears for the automaton were designed using the online tool "Gear Cutter," available at Gear Cutter.
The gears for the automaton were designed using the online tool "Gear Cutter," available at Gear Cutter.
The gears for the automaton were designed using the online tool "Gear Cutter," available at Gear Cutter.